Roboyacht. Summing-up
Before starting RYacht -2 project I decided to summing-up what hade been done during RYacht-1 project.
1. The project started from the idea of creation unmanned wind driven trimaran for patrol and exploration.
The main goal was to create unmanned eco friendly device with a big range and ability to work during days or ,even, weeks.
First sketches:












2nd.












Before starting RYacht -2 project I decided to summing-up what hade been done during RYacht-1 project.
1. The project started from the idea of creation unmanned wind driven trimaran for patrol and exploration.
The main goal was to create unmanned eco friendly device with a big range and ability to work during days or ,even, weeks.
First sketches:



2. As a propulsion system was chosen wing sail. This type of sail easy to control by computer, require minimum amount of servos, have perfect performance and ability to use surface for solar panels.
So, power of wind for motion and power of solar for electronics and servos. And sure thing some batteries for backup and cloudy days :-)
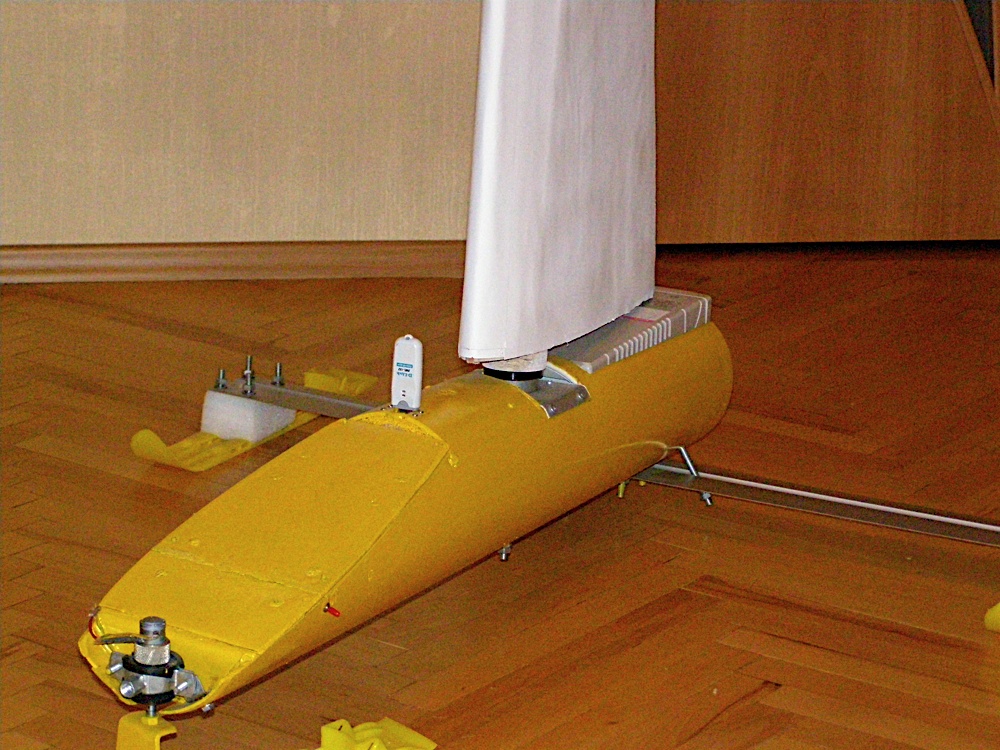
3. Main body was made from a plastic tube.

Brain - single board computer with AMD K-6-266 CPU at the nose of yacht.


Power supply and battery ( UPS) was located on the center and rear end of the body.


Body included two servos - main one for wing sail orientation and small one for taxiing.



4. Device was created in two modifications:
1st.


5. Building process photos:







6. Final look:

7. Test-drive


Due to my relocation to Canada device was completely disassembled.
Now I'm ready to RYacht-2 project!


















